Обидві моделі обладнані демпфуванням у кінці ходу для запобігання ударів поршня по кришці. Дизайн корпусу циліндра дозволяє його монтувати по будь-який поверхні. У Т-подібні пази можливо встановлювати магнітні датчики у різних положеннях.
ТАБЛИЦЯ ДОСТУПНИХ ВИКОНАНЬ
◆ = QCT - доступні для замовлення.
◇ = Запис на розробку в ТЦ.
● = QCB - доступні для замовлення.
| Діаметр, мм/ Виконання |
| Ø20 | ◆ ● | ◆ | ◆ | ◆ |
| Ø25 | ◆ ● | ◆ | ◆ | ◆ |
| Ø32 | ◆ ● | ◆ | ◆ | ◆ |
| Ø40 | ◆ ● | ◆ | ◆ | ◆ |
| Ø50 | ◆ ● | ◆ | ◆ | ◆ |
| Ø63 | ◆ ● | ◆ | ◆ | ◆ |
| Ø80 | ◆ | ◇ | ◇ | ◇ |
ВИКОНАННЯ А Фіксоване механічне гальмування (стандарт) | ВИКОНАННЯ D Пневматичне регульоване гальмування |
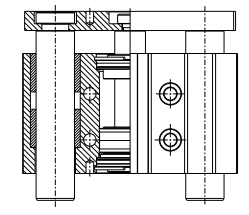 | 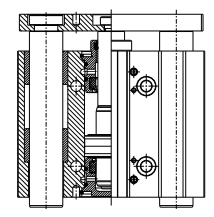 |
» Шток і колонки виконані з неіржавної сталі AISI 420B » Напрямні з підшипником ковзання для високих навантажень » Моноблок: циліндр і напрямні в одному корпусі | » Швидкість переміщення поршня збільшена в 2 рази, порівняно з версією без пневматичного гальмування » Безударна зупинка поршня в крайніх положеннях |
ВИКОНАННЯ Р Пилозахищене виконання | ВИКОНАННЯ S Для підвищених радіальних навантажень, зі зменшеним люфтом |
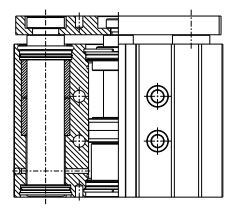 | 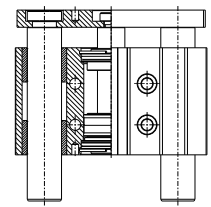 |
» Закриті колонки » Брудозйомники на напрямних і штоці » Зусилля при висуванні збільшено від 30% до 80%*, шляхом подачі стисненого повітря під торець напрямних * = В залежності від діаметру | » Підвищений опір боковим навантаженням і високий опір моментам » Мінімальний люфт платформи |
| Швидкість ходу поршня, мм/с |
| Ø, мм/ Виконання | Виконання А/ Виконання Р/ Виконання S | Виконання D |
| Ø20 - 80 | 50 ÷ 500 | 50 ÷ 1000 |
ЗУСИЛЛЯ НА ПЛАТФОРМІ ЦИЛІНДРІВ ДВОСТОРОННЬОЇ ДІЇ СЕРІЇ QCT, QCB
Зусилля на штоці при прямому робочому ході
Значення в Ньютонах
| ВИКОНАННЯ A / ВИКОНАННЯ D / ВИКОНАННЯ S |
Ø ПОРШНЯ | БЕЗШТОКОВА ПОРОЖНИНА | ТИСК |
| МПа (бар) | МПа (бар) | МПа (бар) | МПа (бар) | МПа (бар) | МПа (бар) | МПа (бар) | МПа (бар) | МПа (бар) | МПа (бар) |
| мм | см2 | 0,10(1) | 0,20(2) | 0,30(3) | 0,40(4) | 0,50(5) | 0,60(6) | 0,70(7) | 0,80(8) | 0,90(9) | 1(10) |
| 20 | 3,14 | 27,72 | 55,4 | 83,2 | 110,9 | 138,6 | 166,3 | 194,1 | 221,8 | 249,5 | 277,2 |
| 25 | 4,91 | 43,32 | 86,6 | 130,0 | 173,3 | 216,6 | 259,9 | 303,2 | 346,5 | 389,9 | 433,2 |
| 32 | 8,04 | 70,97 | 141,9 | 212,9 | 283,9 | 354,9 | 425,8 | 496,8 | 567,8 | 638,7 | 709,7 |
| 40 | 12,56 | 110,89 | 221,8 | 332,7 | 443,6 | 554,5 | 665,4 | 776,2 | 887,1 | 998,0 | 1108,9 |
| 50 | 19,63 | 173,27 | 346,5 | 519,8 | 693,1 | 866,3 | 1039,6 | 1212,9 | 1386,2 | 1559,4 | 1732,7 |
| 63 | 31,16 | 275,08 | 550,2 | 825,2 | 1100,3 | 1375,4 | 1650,5 | 1925,6 | 2200,7 | 2475,7 | 2750,8 |
| 80 | 50,27 | 443,57 | 887,1 | 1330,7 | 1774,3 | 2217,8 | 2661,4 | 3105,0 | 3548,6 | 3992,1 | 4435,7 |
| ВИКОНАННЯ Р |
Ø ПОРШНЯ | БЕЗШТОКОВА ПОРОЖНИНА | ТИСК |
| МПа (бар) | МПа (бар) | МПа (бар) | МПа (бар) | МПа (бар) | МПа (бар) | МПа (бар) | МПа (бар) | МПа (бар) | МПа (бар) |
| мм | см2 | 0,10(1) | 0,20(2) | 0,30(3) | 0,40(4) | 0,50(5) | 0,60(6) | 0,70(7) | 0,80(8) | 0,90(9) | 1(10) |
| 20 | 5,40 | 47,68 | 95,4 | 143 | 190,7 | 238,4 | 286,1 | 333,9 | 381,4 | 429,1 | 476,8 |
| 25 | 8,93 | 78,8 | 157,6 | 236,4 | 315,3 | 394 | 472,9 | 551,6 | 630,3 | 709,3 | 788,1 |
| 32 | 14,32 | 126,41 | 252,7 | 379,3 | 505,7 | 632,1 | 758,4 | 885 | 1011,4 | 1137,7 | 1264,1 |
| 40 | 18,84 | 166,33 | 332,6 | 499,1 | 665,4 | 831,7 | 998 | 1164,4 | 1330,7 | 1497 | 1663,3 |
| 50 | 29,45 | 259,91 | 519,7 | 779,8 | 1039,7 | 1299,5 | 1559,4 | 1819,3 | 2079,2 | 2339,2 | 2599,3 |
| 63 | 40,98 | 361,72 | 723,4 | 1085,2 | 1446,9 | 1808,6 | 2170,3 | 2532 | 2893,7 | 3255,5 | 3617,4 |
Зусилля на штоці при зворотному ході
Значення в Ньютонах
| ВИКОНАННЯ A / ВИКОНАННЯ D / ВИКОНАННЯ P / ВИКОНАННЯ S |
Ø ПОРШНЯ | Ø ШТОКУ | ШТОКОВА ПОРОЖНИНА | ТИСК |
| МПа (бар) | МПа (бар) | МПа (бар) | МПа (бар) | МПа (бар) | МПа (бар) | МПа (бар) | МПа (бар) | МПа (бар) | МПа (бар) |
| мм | мм | см2 | 0,10(1) | 0,20(2) | 0,30(3) | 0,40(4) | 0,50(5) | 0,60(6) | 0,70(7) | 0,80(8) | 0,90(9) | 1(10) |
| 20 | 10 | 2,36 | 20,79 | 41,6 | 62,4 | 83,2 | 104,0 | 124,8 | 145,5 | 166,3 | 187,1 | 207,9 |
| 25 | 12 | 3,78 | 33,34 | 66,7 | 100,0 | 133,3 | 166,7 | 200,0 | 233,4 | 266,7 | 300,0 | 333,4 |
| 32 | 16 | 6,03 | 53,23 | 106,5 | 159,7 | 212,9 | 266,1 | 319,4 | 372,6 | 425,8 | 479,1 | 532,3 |
| 40 | 16 | 10,55 | 93,15 | 186,3 | 279,4 | 372,6 | 465,7 | 558,9 | 652,0 | 745,2 | 838,3 | 931,5 |
| 50 | 20 | 16,49 | 145,55 | 291,1 | 436,6 | 582,2 | 727,7 | 873,3 | 1018,8 | 1164,4 | 1309,9 | 1455,5 |
| 63 | 20 | 28,02 | 247,36 | 494,7 | 742,1 | 989,4 | 1236,8 | 1484,2 | 1731,5 | 1978,9 | 2226,2 | 2473,6 |
| 80 | 25 | 45,36 | 400,25 | 800,5 | 1200,8 | 1601,0 | 2001,3 | 2401,5 | 2801,8 | 3202,0 | 3602,3 | 4002,5 |
ТАБЛИЦЯ ЗНАЧЕНЬ СТАНДАРТНОГО ХОДУ ЦИЛІНДРІВ З МЕХАНІЧНИМ ГАЛЬМУВАННЯ
■ = Поставка зі складу, тільки для виконання А.
□ = Замовлення на виробництво.
| ВИКОНАННЯ A / ВИКОНАННЯ P / ВИКОНАННЯ S |
| Діаметр, мм \ Хід, мм | 10 | 20 | 25 | 30 | 40 | 50 | 75 | 100 | 125 | 150 | 175 | 200 |
| Ø20 | | ■ | | ■ | □ | ■ | ■ | □ | □ | □ | □ | □ |
| Ø25 | | □ | | ■ | ■ | ■ | ■ | □ | □ | □ | □ | □ |
| Ø32 | | | ■ | | | ■ | ■ | ■ | □ | □ | □ | □ |
| Ø40 | | | ■ | | | ■ | □ | □ | □ | □ | □ | □ |
| Ø50 | | | □ | | | □ | □ | ■ | □ | □ | □ | □ |
| Ø63 | | | □ | | | ■ | □ | □ | □ | □ | □ | □ |
| Ø80 | | | □ | | | □ | □ | □ | □ | □ | □ | □ |
ПРИМІТКА: Для нестандартних ходів використовувати розміри на кресленні, які відповідають найближчому більшому стандартному ходу з таблиці. ПРИКЛАД: для пневмоциліндра з ходом 120 мм, необхідно обрати розміри на кресленні, що відповідають пневмоциліндру з ходом 125 мм; 105 мм (> 100 мм), то розміри також будуть відповідати циліндру з ходом 125 мм. Хід більше 200 мм по замовленню.
ТАБЛИЦЯ ЗНАЧЕНЬ СТАНДАРТНОГО ХОДУ ЦИЛІНДРІВ З ПНЕВМАТИЧНИМ ГАЛЬМУВАННЯМ
□ = Замовлення на виробництво.
| ВИКОНАННЯ D |
| Діаметр, мм \ Хід, мм | 25 | 50 | 75 | 100 | 125 | 150 | 175 | 200 |
| Ø20 | □ | □ | □ | □ | □ | □ | □ | □ |
| Ø25 | □ | □ | □ | □ | □ | □ | □ | □ |
| Ø32 | □ | □ | □ | □ | □ | □ | □ | □ |
| Ø40 | □ | □ | □ | □ | □ | □ | □ | □ |
| Ø50 | □ | □ | □ | □ | □ | □ | □ | □ |
| Ø63 | □ | □ | □ | □ | □ | □ | □ | □ |
| Ø80 | □ | □ | □ | □ | □ | □ | □ | □ |
ТЕХНІЧНІ ХАРАКТЕРИСТИКИ
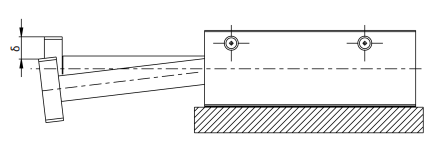
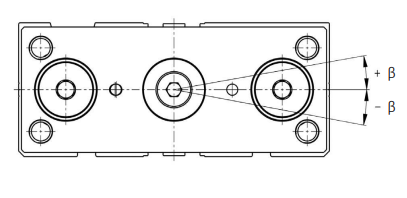
Кутовий люфт β платформи через зазор в опорах ковзання у втягненому положенні, без навантаження
| КУТОВИЙ ЛЮФТ β, ° | | Ø, мм | QCT | QCB | | 20 | ±0,08 | ±0,07 | | 25 | ±0,07 | ±0,06 | | 32 | ±0,06 | ±0,05 | | 40 | ±0,05 | ±0,05 | | 50 | ±0,04 | ±0,04 | | 63 | ±0,04 | ±0,04 | | 80 | ±0,03 | - |
|  |
Максимальний зазор в опорах ковзання, без навантаження
| ЗАЗОР, мм |
| Ø, мм | QCT | QCB |
| 20 | 0,08 | 0,06 |
| 25 | 0,08 | 0,06 |
| 32 | 0,08 | 0,06 |
| 40 | 0,08 | 0,06 |
| 50 | 0,08 | 0,06 |
| 63 | 0,08 | 0,06 |
| 80 | 0,09 | - |
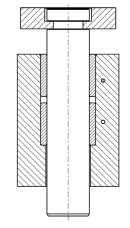
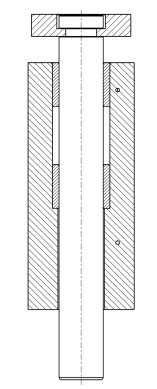
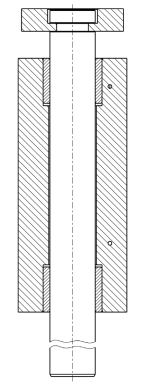
Розташування опор ковзання
| ВИКОНАННЯ А / ВИКОНАННЯ D / ВИКОНАННЯ P | ВИКОНАННЯ S |
| Ø20-25 | Хід 20-50 мм | | Ø32, 40, 80 | Хід 25 мм |
| | Ø20, 25 | Хід 75-200 мм | | Ø32, 40, 80 | Хід 50-200 мм | | Ø50, 63 | Хід 25-200 мм |
| | Ø20,25 | Хід 20-200 мм | | Ø32, 40, 50, 63 | Хід 25-200 мм |
|
 |  |  |
ТЕХНІЧНІ ХАРАКТЕРИСТИКИ
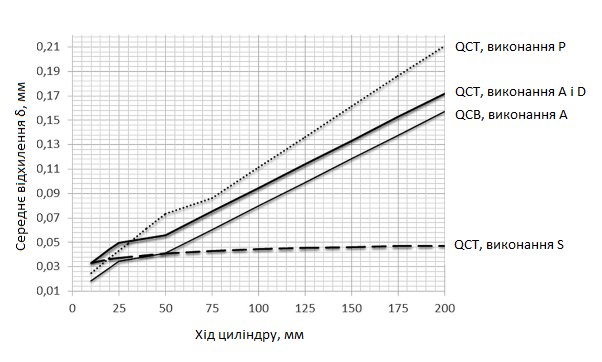
Середнє відхилення платформи через зазор в опорах ковзання як функція ходу, без навантаження
Ремкомплекти
| Діаметр поршня, мм | Кодування ремкомплекту | Склад ремкомплекту |
| 20 | K02-QC20 | Кільце ущільнення поршня – 1 шт. Кільце ущільнення кришки – 2 шт. Манжета поршня – 2 шт. Манжета штоку – 1 шт. |
| 25 | K02-QC25 |
| 32 | K02-QC32 |
| 40 | K02-QC40 |
| 50 | K02-QC50 |
| 63 | K02-QC63 |
ТАБЛИЦЯ МАКСИМАЛЬНО ДОПУСТИМОГО НАВАНТАЖЕННЯ (F)
Серія QCT - ВИКОНАННЯ A / ВИКОНАННЯ D
F (Н) 1Н = 0.102 кгс Приклад: QCT2A025A020 F = 140 Н | 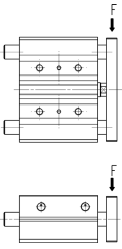 | 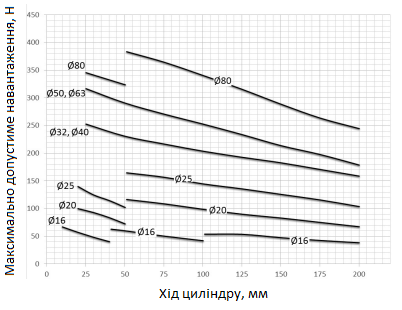 |
Значення в Ньютонах
| Хід |
| Ø | 10 | 20 | 25 | 30 | 40 | 50 | 75 | 100 | 125 | 150 | 175 | 200 |
| 20 | - | 100 | - | 93 | 84 | 73 | 109 | 99 | 90 | 83 | 75 | 67 |
| 25 | - | 140 | - | 125 | 115 | 103 | 157 | 145 | 136 | 126 | 116 | 104 |
| 32 | - | - | 253 | - | - | 231 | 217 | 204 | 193 | 183 | 171 | 159 |
| 40 | - | - | 254 | - | - | 231 | 217 | 204 | 193 | 183 | 171 | 159 |
| 50 | - | - | 317 | - | - | 291 | 271 | 253 | 234 | 214 | 198 | 179 |
| 63 | - | - | 318 | - | - | 291 | 271 | 253 | 234 | 214 | 198 | 179 |
| 80 | - | - | 346 | - | - | 324 | 365 | 341 | 316 | 289 | 264 | 245 |
Серія QCT - ВИКОНАННЯ P
F (Н) 1Н = 0.102 кгс Приклад: QCT2A032P025 F = 192 Н | 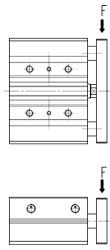 | 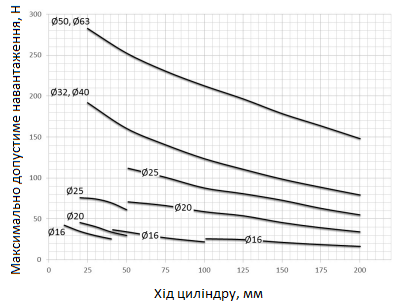 |
Значення в Ньютонах
| Хід |
| Ø | 10 | 20 | 25 | 30 | 40 | 50 | 75 | 100 | 125 | 150 | 175 | 200 |
| 20 | - | 46 | - | 41 | 34 | 30 | 66 | 59 | 54 | 46 | 39 | 34 |
| 25 | - | 76 | - | 75 | 70 | 61 | 101 | 88 | 83 | 73 | 63 | 55 |
| 32 | - | - | 192 | - | - | 161 | 141 | 124 | 111 | 99 | 89 | 80 |
| 40 | - | - | 192 | - | - | 161 | 141 | 124 | 111 | 99 | 89 | 80 |
| 50 | - | - | 283 | - | - | 253 | 231 | 213 | 197 | 179 | 164 | 148 |
| 63 | - | - | 284 | - | - | 253 | 231 | 213 | 197 | 179 | 164 | 148 |
ТАБЛИЦЯ МАКСИМАЛЬНО ДОПУСТИМОГО НАВАНТАЖЕННЯ (F)
Серія QCT - ВИКОНАННЯ S
F (Н) 1Н = 0.102 кгс Приклад: QCT2A040S125 F = 224 Н |  | 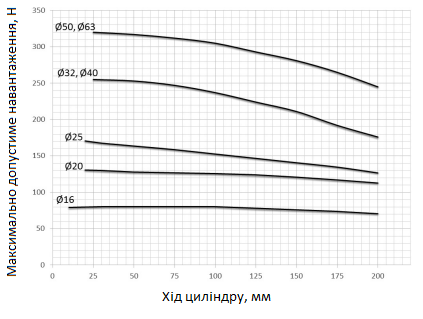 |
Значення в Ньютонах
| Хід |
| Ø | 10 | 20 | 25 | 30 | 40 | 50 | 75 | 100 | 125 | 150 | 175 | 200 |
| 20 | - | 131 | - | 130 | 129 | 128 | 127 | 126 | 124 | 121 | 117 | 113 |
| 25 | - | 171 | - | 168 | 166 | 164 | 159 | 153 | 147 | 141 | 135 | 127 |
| 32 | - | - | 255 | - | - | 253 | 247 | 237 | 224 | 211 | 192 | 176 |
| 40 | - | - | 256 | - | - | 253 | 247 | 237 | 224 | 211 | 192 | 176 |
| 50 | - | - | 319 | - | - | 317 | 312 | 305 | 293 | 281 | 265 | 245 |
| 63 | - | - | 320 | - | - | 317 | 312 | 305 | 293 | 281 | 265 | 245 |
Серія QCB
F (Н) 1Н = 0,102 кгс Приклад: QCB2A025A020 F = 142 Н |  | 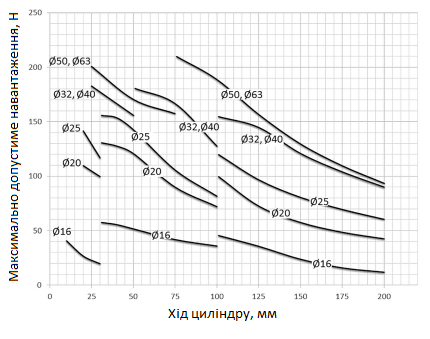 |
Значення в Ньютонах
| Хід |
| Ø | 10 | 20 | 25 | 30 | 40 | 50 | 75 | 100 | 125 | 150 | 175 | 200 |
| 20 | - | 110 | - | 100 | 128 | 121 | 90 | 72 | 73 | 58 | 49 | 43 |
| 25 | - | 142 | - | 117 | 154 | 143 | 106 | 82 | 97 | 81 | 70 | 61 |
| 32 | - | - | 183 | - | - | 156 | 167 | 128 | 145 | 121 | 104 | 90 |
| 40 | - | - | 183 | - | - | 156 | 167 | 128 | 145 | 121 | 104 | 90 |
| 50 | - | - | 201 | - | - | 171 | 158 | 189 | 157 | 130 | 111 | 94 |
| 63 | - | - | 201 | - | - | 171 | 158 | 189 | 157 | 130 | 111 | 94 |
ТАБЛИЦЯ МАКСИМАЛЬНО ДОПУСТИМОГО КРУТНОГО МОМЕНТУ (M)
Серія QCT - ВИКОНАННЯ A / ВИКОНАННЯ D
M (Н*м) 1Н*м = 0,102 кгс* м Приклад: QCT2A025A020 M = 4,5 Н*м |  | 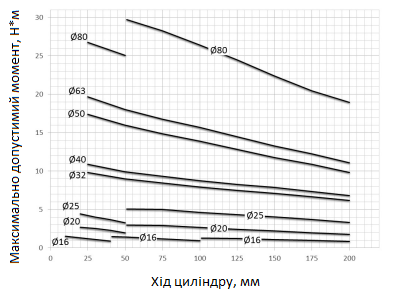 |
Значення в Н*м
| Хід |
| Ø | 10 | 20 | 25 | 30 | 40 | 50 | 75 | 100 | 125 | 150 | 175 | 200 |
| 20 | - | 2,7 | - | 2,5 | 2,3 | 2,0 | 2,9 | 2,7 | 2,4 | 2,2 | 2,0 | 1,8 |
| 25 | - | 4,5 | - | 4,0 | 3,7 | 3,3 | 5,0 | 4,6 | 4,4 | 4,0 | 3,7 | 3,3 |
| 32 | - | - | 9,9 | - | - | 9,0 | 8,5 | 8,0 | 7,5 | 7,1 | 6,7 | 6,2 |
| 40 | - | - | 10,9 | - | - | 9,9 | 9,3 | 8,8 | 8,3 | 7,9 | 7,4 | 6,8 |
| 50 | - | - | 17,4 | - | - | 16,0 | 14,9 | 13,9 | 12,9 | 11,8 | 10,9 | 9,8 |
| 63 | - | - | 19,7 | - | - | 18,0 | 16,8 | 15,7 | 14,5 | 13,3 | 12,3 | 11,1 |
| 80 | - | - | 26,8 | - | - | 25,1 | 28,3 | 26,4 | 24,5 | 22,4 | 20,5 | 19,0 |
Серія QCT - ВИКОНАННЯ P
M (Н*м) 1Н*м = 0,102 кгс* м Приклад: QCT2A032P025 M = 7,5 Н*м |  | 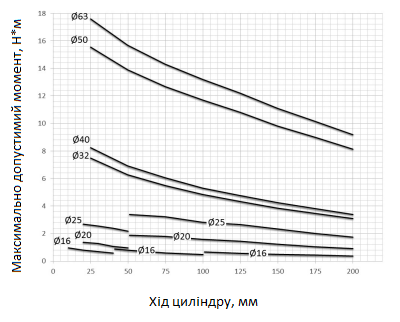 |
Значення в Н*м
| Хід |
| Ø | 10 | 20 | 25 | 30 | 40 | 50 | 75 | 100 | 125 | 150 | 175 | 200 |
| 20 | - | 1,2 | - | 1,1 | 0,9 | 0,8 | 1,8 | 1,6 | 1,5 | 1,2 | 1,1 | 0,9 |
| 25 | - | 2,4 | - | 2,4 | 2,2 | 2,0 | 3,2 | 2,8 | 2,7 | 2,3 | 2,0 | 1,8 |
| 32 | - | - | 7,5 | - | - | 6,3 | 5,5 | 4,8 | 4,3 | 3,9 | 3,5 | 3,1 |
| 40 | - | - | 8,3 | - | - | 6,9 | 6,1 | 5,3 | 4,8 | 4,3 | 3,8 | 3,4 |
| 50 | - | - | 15,6 | - | - | 13,9 | 12,7 | 11,7 | 10,8 | 9,8 | 9,0 | 8,2 |
| 63 | - | - | 17,6 | - | - | 15,7 | 14,3 | 13,2 | 12,2 | 11,1 | 10,2 | 9,2 |
ТАБЛИЦЯ МАКСИМАЛЬНО ДОПУСТИМОГО КРУТНОГО МОМЕНТУ (M)
Серія QCT - ВИКОНАННЯ S
M (Н*м) 1Н*м = 0,102 кгс* м Приклад: QCT2A040S125 M = 9,6 Н*м | 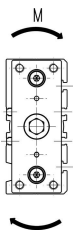 | 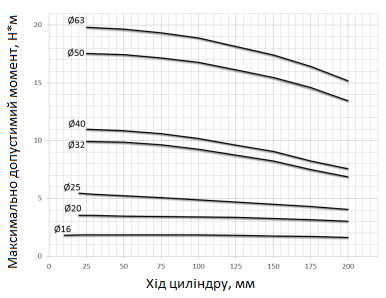 |
Значення в Н*м
| Хід |
| Ø | 10 | 20 | 25 | 30 | 40 | 50 | 75 | 100 | 125 | 150 | 175 | 200 |
| 20 | - | 3,5 | - | 3,5 | 3,5 | 3,5 | 3,4 | 3,4 | 3,3 | 3,3 | 3,2 | 3,1 |
| 25 | - | 5,5 | - | 5,4 | 5,3 | 5,2 | 5,1 | 4,9 | 4,7 | 4,5 | 4,3 | 4,1 |
| 32 | - | - | 9,9 | - | - | 9,9 | 9,6 | 9,2 | 8,7 | 8,2 | 7,5 | 6,9 |
| 40 | - | - | 11,0 | - | - | 10,9 | 10,6 | 10,2 | 9,6 | 9,1 | 8,3 | 7,6 |
| 50 | - | - | 17,5 | - | - | 17,4 | 17,2 | 16,8 | 16,1 | 15,5 | 14,6 | 13,5 |
| 63 | - | - | 19,8 | - | - | 19,7 | 19,3 | 18,9 | 18,2 | 17,4 | 16,4 | 15,2 |
Серія QCB
M (Н*м) 1Н = 0,102 кгс*м Приклад: QCB2A025A020 M = 4,5 Н*м | 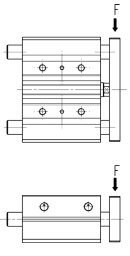 | 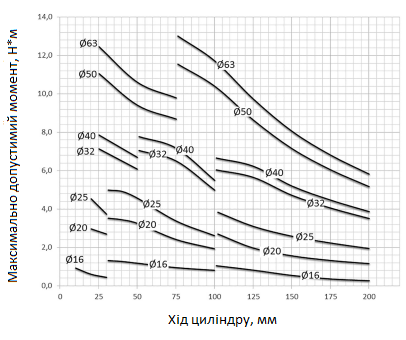 |
Значення в Н*м
| Хід |
| Ø | 10 | 20 | 25 | 30 | 40 | 50 | 75 | 100 | 125 | 150 | 175 | 200 |
| 20 | - | 3,0 | - | 2,7 | 3,5 | 3,3 | 2,4 | 1,9 | 2,0 | 1,6 | 1,3 | 1,2 |
| 25 | - | 4,5 | - | 3,7 | 4,9 | 4,6 | 3,4 | 2,6 | 3,1 | 2,6 | 2,2 | 2,0 |
| 32 | - | - | 7,1 | - | - | 6,1 | 6,5 | 5,0 | 5,7 | 4,7 | 4,1 | 3,5 |
| 40 | - | - | 7,9 | - | - | 6,7 | 7,2 | 5,5 | 6,2 | 5,2 | 4,5 | 3,9 |
| 50 | - | - | 11,1 | - | - | 9,4 | 8,7 | 10,4 | 8,6 | 7,2 | 6,1 | 5,2 |
| 63 | - | - | 12,5 | - | - | 10,6 | 9,8 | 11,7 | 9,7 | 8,1 | 6,8 | 5,8 |
ДЕМОНСТРАЦІЯ ЕФЕКТИВНОСТІ РОБОТИ ПНЕВМАТИЧНОЇ СИСТЕМИ ГАЛЬМУВАННЯ
На прикладі циліндрів Серії QCT з діаметром поршня 32 мм і довжиною робочого ходу 100 мм
Мод. QCT2A032A100 із системою механічного гальмування
Мод. QCT2A032D100 із системою пневматичного регульованого гальмування
Графіки зміни координати і швидкості руху циліндрів від часу. Отримані експериментально.
ХОЛОСТИЙ ХІД
X(t) x 10 [мм] - координата; V (t) [мм/с] - швидкість | X(t) x 10 [мм] - координата; V (t) [мм/с] - швидкість |
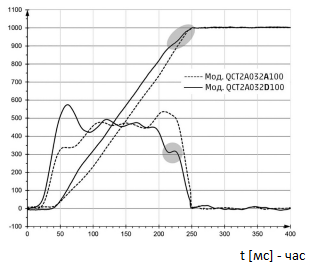 | 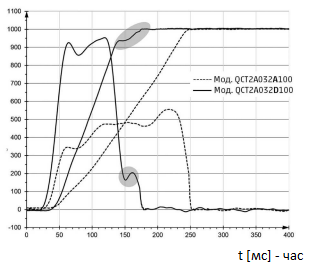 |
Швидкість 400-500 мм/с. QCT2A032A100: Система механічного гальмування згладжує сприйняття ефекту удару поршня в кришку циліндру. QCT2A032D100: Система пневматичного гальмування легко налаштовується і працює ефективно. Час перехідного процесу однаковий. | Швидкість максимальна для циліндрів. QCT2A032A100: Пропускна здатність повітряних портів циліндра конструктивно обмежена. Таке рішення дозволяє уникнути руйнування циліндра: в кінці хода висока кінетична енергія циліндра перетворюється в енергію удару поршня в кришку циліндра або енергію удару об'єкта переміщення в нерухому частину верстата. QCT2A032D100: Максимальна швидкість переміщення досягає 1 м/с. Система пневматичного гальмування легко налаштовується і працює ефективно. Приріст продуктивності циліндру і технологічного обладнання, у складі якого він встановлений, – більше 50%. |
ДЕМОНСТРАЦІЯ ЕФЕКТИВНОСТІ РОБОТИ ПНЕВМАТИЧНОЇ СИСТЕМИ ГАЛЬМУВАННЯ
На прикладі циліндрів Серії QCT з діаметром поршня 32 мм і довжиною робочого ходу 100 мм
Мод. QCT2A032A100 із системою механічного гальмування
Мод. QCT2A032D100 із системою пневматичного регульованого гальмування
Графіки зміни координати і швидкості руху циліндрів від часу. Отримані експериментально.
Інерційна маса об'єкту керування - 5 кг
X(t) x 10 [мм] - координата; V (t) [мм/с] - швидкість | X(t) x 10 [мм] - координата; V (t) [мм/с] - швидкість |
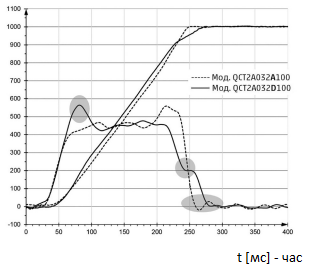 | 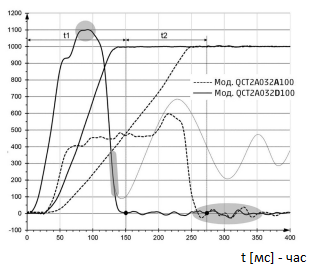 |
Швидкість 400-500 мм/с. QCT2A032A100: За рахунок механічної системи гальмування в кінці ходу спостерігається невеликий пружний відскок: видно коливання швидкості, чути глухий удар поршня в кришку. QCT2A032D100: Висока витрата повітря, яка наповнює безштокову порожнину циліндра, та інерційна маса є обуренням в системі для висування поршня зі штоком і народжують перерегулювання по швидкості. Далі за рахунок дроселювання у вихлопній порожнині швидкість виходить на значення, що встановилося. Система пневматичного гальмування легко налаштовується і працює ефективно. | Швидкість максимальна для циліндрів. QCT2A032A100: Швидкість обмежена, чути глухий удар поршня в кришку, швидкість змінює знак в кінці ходу. QCT2A032D100: При відсутності дроселювання на вихлопі та при переміщенні інерційних мас швидкість циліндра змінюється по гармонічному закону. Характер коливань – загасаючий. Ці коливання показані тонкими лініями і була б справедлива при більшій довжині робочого хода. При невеликих довжинах ходів систему можна налаштувати так, щоб половину робочого хода швидкість росла і половину спадала. Система пневматичного гальмування може бути налаштована таким чином, щоб виключити висхідний тренд другого можливого коливання швидкості, вирішуючи задачу плавного загальмовування до нульової швидкості без відскоків та ударів. Приріст продуктивності циліндра і технологічного обладнання, у складі якого він встановлений, – до 100%. |



 , New
, New
 , New
, New

 , New
, New

 , New
, New
 , New
, New
 , New
, New
 , New
, New
 , New
, New
 , New
, New

 , New
, New

 , New
, New
 , New
, New

 , New
, New
 , New
, New
 , New
, New
 , New
, New